2020年9月8日

超速成爲交通事故的首要殺手,特别是像高速公路這些速度快的道路,超速引起的交通事故就更加頻(pín)繁了。所以安裝測速儀的目的就是爲了有效減少因超速引起的交通事故。(現已經廣泛用于警察超速測試等行業。)
一(yī)、
智慧交通廣域雷達測速儀概念理解
1、雷達測速是什麽?
原理:測速雷達主要利用了多普勒效應(Doppler Effect),當目标向雷達天線靠近時,反射信号頻(pín)率将高于發射機頻(pín)率;反之,當目标遠離(lí)天線而去(qù)時,反射信号頻(pín)率将低于發射機率。如此即可借由頻(pín)率的改變數值,計算出目标與雷達的相對速度。
2、 智慧交通 網絡中(zhōng)廣域雷達測速的理解
① 檢測技術分(fēn)爲了三大(dà)類:點、面、網。
“點”是傳統的線圈和地磁的方式,主要實現點的數據采集;
“面”是主要是視頻(pín)和雷達技術,這兩種技術在近幾年發展迅速,可以實現大(dà)區域的檢測;
“網”主要是目前互聯網公司提供的抽樣車(chē)輛的軌迹數據,該數據爲交通的宏觀決策提供了較好的支撐。

② 擴展:交通雷達技術的發展可分(fēn)爲主要三個階段。
第一(yī)是單純的測速技術,利用多普勒原理實現目标速度檢測,但對于低速目标檢測精度較低。
第二是測速+測距技術,典型應用是卡口觸發雷達,在規定的範圍内提供數據觸發信号。
第三是測速+測距+測角(廣域雷達),将角度的概念融入進來,可精準的判斷每一(yī)個目标的即時位置和即時速度。
二、 雷達測速儀
一(yī)般道路上的雷達測速儀分(fēn)爲固定測速和移動測速兩類。固定測速又(yòu)分(fēn)爲定點式雷達測速和區間測速。固定測速顧名思義就是指定點式安裝測速儀的方式來進行定點測速。區别于移動測速的靈活性,移動測速儀可以在同一(yī)條道路不同位置、也可以是不同道路進行靈活測速,一(yī)般移動測速多以警車(chē)巡邏測速的方式進行。
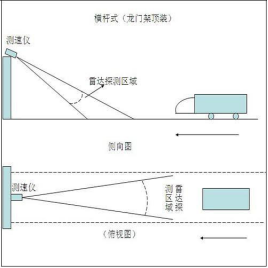
(1)高速公路橫杆頂裝式
通過将測速儀安置在龍門架或者其他橫杆上,通過将測速儀與地面擺放(fàng)呈一(yī)定角度(測速儀與路面夾角不宜超過30度)。
(2)移動測速儀
将雷達測速儀安裝在交警巡邏車(chē)上或者裝在三腳架上擺放(fàng)在道路兩邊進行踩點式測速。
三、 推薦
方案:
FET335XS 核心闆
FET335XS核心闆ARM Cortex-A8架構,運行頻(pín)率800MHz。核心闆所有元器件均采用工(gōng)業級,整闆運行溫度-40℃~+85℃,經過了嚴格高低溫測試。
廣域雷達模塊Smartmicro雷達:監測路面信息,隻輸出車(chē)輛數據,業主要監測交通事件分(fēn)析,需要雷達數據處理單元。
推薦原因
模塊接口:網口、485串口
系統:linux系統;
主頻(pín):800MHz-1GHz
溫寬:工(gōng)業級
原生(shēng)網口:2路,1路 接後台服務器,1路,接廣域雷達模塊
串口:1-4路不等,485,廣域雷達模塊
客戶需求:2個
千兆網口,
郵票(piào)孔
應用場景:高速公路 龍門架
業務:實現對雷達數據分(fēn)析和處理,監測交通事件,上傳中(zhōng)心服務器,輔助交管部門對車(chē)輛信息監測。