2021-12-28
一(yī)、特種車(chē)輛的控制系統應用場景
工(gōng)程車(chē)輛:
360°全景環視系統、安全監控系統、敞車(chē)對中(zhōng)系統、履帶吊控制系統、起重機控制系統、升降機控制系統、塔機安全控制系統、攤鋪機控制系統、挖掘機控制系統、旋挖鑽機控制系統、壓路機自動駕駛系統、裝載機控制系統
農業機械:
拖拉機控制系統、拖拉機電(diàn)液提升系統、收獲機系統、插秧機系統、港口機械、消防車(chē)輛、軌道交通、物(wù)流車(chē)輛、環衛車(chē)輛。
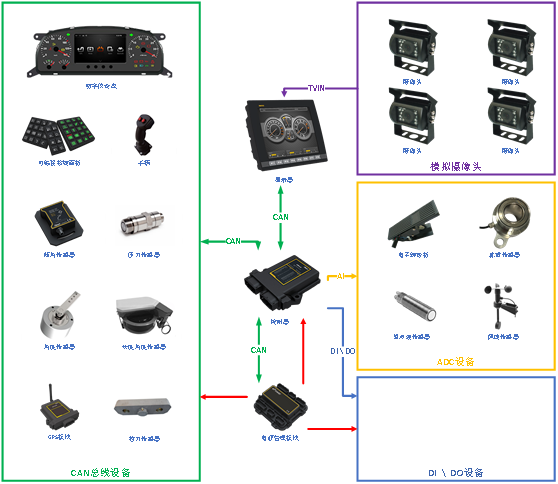
二、控制系統的基本組成
三、産品推薦
1、車(chē)輛顯示器
推薦方案:FETA40i-C、FETT3-C、FETMX6Q-C、FET4418-C
用到的主要功能:
顯示:一(yī)般在10.4寸以下(xià),電(diàn)阻觸摸(也有的要電(diàn)容觸摸)
CAN:2個,用于連接控制器和傳感器
TVIN:4個,用于接入模拟攝像頭
4G:聯網,遠程監控
GPIO:按鍵、指示燈
OS:Linux+Codesys,類似組态和PLC的編程,簡單易操作,車(chē)廠的工(gōng)程人員(yuán)大(dà)多用CodeSys編程。
2、儀表盤
推薦方案:FETA40i-C、FETT3-C、FETMX6Q-C
用到的主要功能:
顯示:12.1以下(xià),1080P寬屏,LVDS接口
CAN:接入車(chē)載CAN網絡
OS:需要快速啓動,3秒最佳。但是一(yī)般Linux系統做不到,做到10秒内也可以
3、控制器
推薦方案:FET1061-S,高速IO、運行速度快、實時性好、性價比高
用到的主要功能:
CAN:2路,用于連接顯示器和傳感器、控制外(wài)設等
DI \ DO:用于控制輸出和檢測狀态量
AI :用于接模拟量輸入的傳感器
ENC:捕獲旋轉編碼器的信号
OS:CodeSys,用來做PLC編程
4、電(diàn)源管理模塊
推薦方案:FET1061-S,高速IO、運行速度快、實時性好、性價比高
用到的主要功能:
CAN:1路,用于連接顯示器和傳感器、控制外(wài)設等
DI \ DO:用于控制輸出和檢測狀态量
OS:CodeSys,用來做PLC編程


信邁公衆号二維碼